About Me
To cultivate trustworthy autonomy adept at executing complex tasks (e.g., building-scaled manipulation) in the dynamic living environments, his recent research endeavors center on advancing the realm of machine perception and geometry representation for a system-level sensing-realistic simulation and generalizable robot learning.
Formerly, he gained the AEC industry experience and obtained his bachelor's from Zhejiang University, where he was fortunate to engage in the project of building-scaled robotic manipulation for China's first all carbon fiber structure designed architecture, featured in ArchDaily 2019. Recognized for his contributions to this project, he got the opportunity to manage a robotic fabrication lab at ZJU and assist in hosting seasonal undergrad courses and seminars to introduce robotic automation into architectural education.
Recent Highlights
12/2023. The OpenARK team will showcase our latest progress in the 6DoF pose estimation algorithm and a robot tracking dataset at the Vive Center Gala.
10/2023. I will be giving a 2-hour online talk at Xi'an University of Architecture and Technology. The topic is "From Robotic Fabrication to 3D Scene Understanding."
10/2023. We are releasing DTTD v2! A 3D object tracking dataset and a transformer-based 6DoF object pose estimation network that is robust to sensor depth noise.
08/2023. Our paper "MARL: Multi-scale Archetype Representation Learning for Urban Building Energy Modeling" is accepted at ICCV workshop 2023, CVAAD.
01/2023. We won the MIT RealityHACK 2023 in Spatial Audio Track!
My Projects
Pose Estimation
🍎Robust Digital-Twin Localization via An RGBD-based Transformer Network and A Comprehensive Evaluation on a Mobile Dataset
AI FABZixun Huang*, Keling Yao*, Seth Z. Zhao*, Chuanyu Pan*, Chenfeng Xu, Kathy Zhuang, Tianjian Xu, Weiyu Feng, supervised by Dr. Allen Y. Yang
[github] [arxiv] [bibtex] [az_cam dataset] [iphone dataset] in submission to TPAMI
Are current pose estimation methods robust enough to ignore the distortion and interpolation noise in widely-adopted IPhone's LiDAR measurements? Our DTTD-Net introduced Fourier-transform enhanced MLP and fusion-robustifying Transformer into 3D Object Tracking Tasks.

Robotic Manipulation
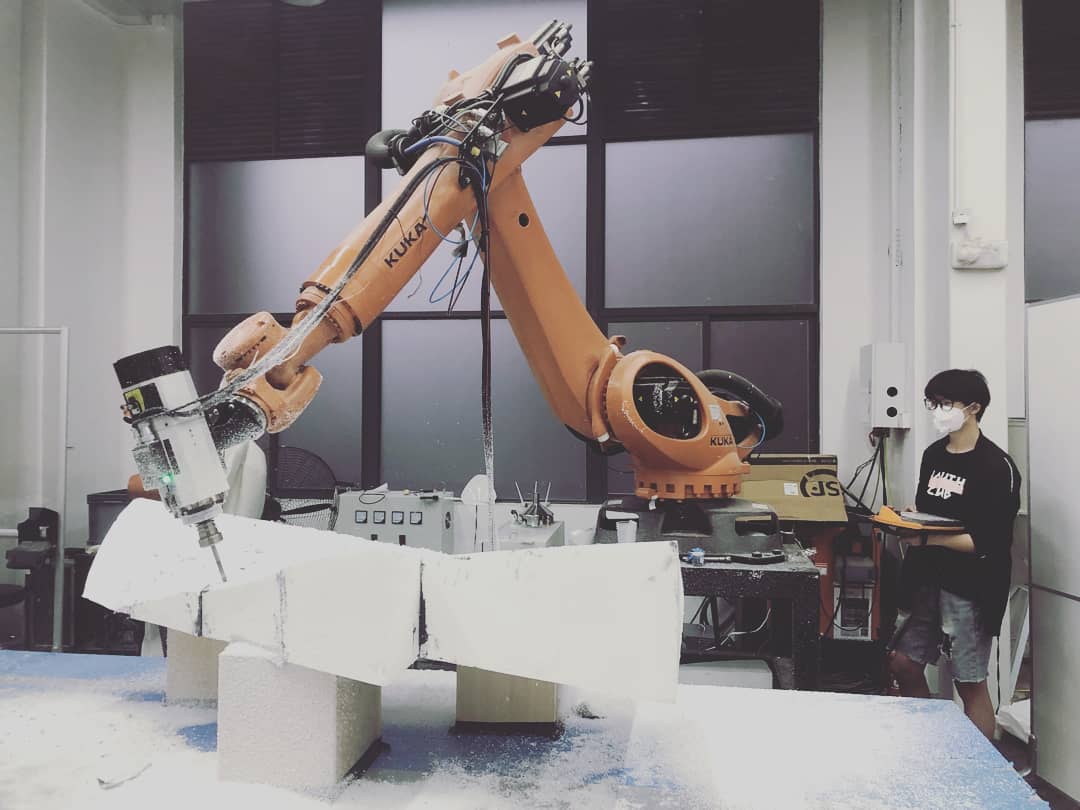
🏠Jieyuan Shrine: Advancing Modular Architecture Construction with a Robotic Carbon-Fiber Weaving System
AI FABKuanting Lai*, Zhe Liang*, Zixun Huang*, Peiyi Huang*, Yuhong Ha, Zhihao Liang, Weiwen Jian, Hyde Meng, funded by Wutopia Lab & RoboticPlus, featured in ArchDaily
[video] [animation] [poster] [archdaily, domus, gooood]
Our work has been featured in the most prestigious architectural media. We achieved China’s first all carbon-fiber structure designed architecture. Density of the structure is controlled at 18KG per cubic meter and the bearing capacity of 400KG is achieved.
🍎🏠Efficient Discrete Construction: An Experimental Design-to-Fabrication Workflow with Automatic UAV Integration
AI FABZhe Guo*, Zixun Huang*, Xuhui Lin*, Kai Xiao*, Sijie Gao*, Ziyue Hu, Xiaoliang Ying, Yitian Lu, You Lyu, Qixin Li, Lihua Zhang, Likai Wei, Hongxin Wang, Zihao Zhang, supervised by Prof. Xiang Wang*
[video] [poster] drawing credit: zczlxl3@ucl.ac.uk
We integrated drone tracking (via MoCap) and controlling (via ROS) into Grasshopper3D; Achieved discrete stacking with utilizing a UAV gripping system crafted from Raspberry Pi, PX4 and 3D printed hardware, etc.
🏠A Series: Towards Mass Customization Techniques in Casting Mold Production Using 6-Axis Robotic Arms
AI FABZixun Huang*, worked closely in a series of projects with Kunshen Huang*, Zee Liang*, Sihan Wang, Weishun Xu, Prof. Raspall Felix
[IASS 2019] [SiGraDi 2020] [poster] [demo installation] [video3] This is a
continuing series of researches on efficient mass customization. * denotes equal contribution considering multiple projects. To check other
students' work co-mentored by me and Zee Leong.
We developed a rapid 3D clay printing system and hot-wire cuttingsystem using high-torque stepper motors, Arduino, KUKA Robots, etc. I also enabled non-planar robotic printing on quadric surfaces!!











Project
<Waiting>Travel Demand & Built Environment:
AI FABML Engineering
Project
XR Working Environment Editor: MIT Reality HACK 2023 Winner
AI FABAR & Andriod Dev
Project
INSOME Cloud:
AI FABAndriod Dev
Project
Generative Adversarial City Sense Generation
AI FABWeb Dev

Find Where am I







>> Contributed to Digital Twin Tracking Dataset (DTTD v1.0).
>> Co-first authored the DTTD v1.1 based on iPhone LiDAR camera and ARKit, in submission to WACV.
>> Achieved 44 scene annotation with over 13k frames using programmed Python & C++ toolkits.
ALGORITHM
>> Led the model design and training strategy of the coarse estimator for 6-Dof object tracking pipeline.
>> Achieved a coarse estimator with accuracy (ADDS 98.32%) on both YCBV & DTTD-iPhone Dataset using Transformer-based dual-encoder structure; conducted over 25 recorded ablation experiments.
>> Developed a building customization and management system from 0 to 1 built on Android.
>> Tools: Unreal Engine 4, Java Spring, GraphQL, Redis, Tencent Cloud, Nginx, Django 3 (Agile Prototyping), Android, MySQL
>> Led and prototyped a cost management and sustainability scoring system from 0 to 1, and generalized it into launched urban planning projects.
>> Tools: Java Spring, React.js, Redux, Redis, Tencent Cloud, Nginx, Django REST Framework (Agile Prototyping), MySQL
>> Conducted over 85-page policy study report on logistics network business based on 15-minute city accessibility, community commerce, and revitalization of aging neighborhoods.
Worked closely with Kaihang L. Weishun X. Zhiyuan X. Yunpeng W. et.al
>> Developed Python codes to collected and analyzed about 537k online data (POI, Weibo, Twitter, MaFengWo).
>> Supported the design team to discover data-driven evidences for old towns revitalization in 3 cities: Chengdu, Xiangshan, and Xianju; produced about 400k RMB in revenue for startup design studio.
Worked closely with Weishun X. et.al
>> Designed and fabricated the China's first all-carbon fiber pavilion: Jieyuan Shrine and a robotic weaving system using KUKA Robots and programmable 3D modeling.
>> Achieved the 4 meters high and 3.8 meters wide entire structure weaved with a continuous line of carbon-fiber. Density of the structure is controlled at 18KG per cubic meter and the bearing capacity of 400kg is achieved.
ALGORITHM
>> Planned and programmed the robotic weaving path and the simulation for 40% modules of the pavilion.
Worked closely with Tim L. Zee L. Yuhong H. Peiyi H.
>> Improved the success rate by 63.6% of the robotic hot-wire cutting pipeline by fixing the robotic path generation algorithm.
Worked closely with Hao M. Zee L. Peiyi H.
COMPSCI 294-196 GenAI & LLM (Ongoing)
COMPSCI 285 Reinforcement Learning(Ongoing)
COMPSCI 282 Design Deep Neural Net
COMPSCI 280 Computer Vision
COMPSCI 294-137 Immersive Computing (Audit)
COMPSCI 294-026 Computational Photography
>> Co-first authored an VQAE-based method for residential buildings' latent embedding and clustering.
>> Reduced the computation time by 133.7 times for NYC's residential energy consumption estimation.
Worked closely with Phd. Xinwei Z.
>> First-authored an attention-based method for travel demand time-serials prediction from the perspective of built environment.
APPLICATION
>> Designed and implemented an urban sense mapping system based on adversarial generation algorithms from 0 to 1.
>> Shorten the average urban quantitative survey cost from 3 days to 3 seconds per person among over 100 designers.
>> Tools: Django, React.js, PyTorch, Tencent Cloud, Nginx, uWSGI, MySQL.
Selected Course: Application of Wireless Network, Image Analysis and Processing, Fundamentals of Computer Science, C Programming, Architectural Robotics, Computer Aided Design, Parametric Design, Architectural Physics, Architectural Design, Engineering Economy, Building Codes.
>> Architectural Robotics.
>> Computational Design &Robotic Fabrication.
PUBLICATION
>> Co-first authored: Robotic Fabrication of Sustainable Hybrid Formwork with Clay and Foam for Concrete Casting.
FIRST CONTRIBUTION
>> Designed the entire design-to-manufacturing workflow and led students to conduct it; wrote the first edition of the paper.
>> Engineered the entire 3D clay printing tool; achieved the SOTA efficiency for concrete formwork in material sustainable utilization, time &labor costs.
Worked closely with Weishun X.
Selected Course: Calculus I, Calculus II, Calculus III, Linear Algebra, Ordinary Differential Equations, Inorganic &Analytical Chemistry, University Physics A, Descriptive Geometry, Engineering Graphics.





